全世界都不爱停车,于是有了自动泊车
本文主要从几个方面来谈谈自动停车的技术,第1部份是自动停车的发展历史,第2部份是自动停车的内部结构和1些厂家的方案。值得注意的是,在不同的国家,落实不同场景自动化的意愿也不相同,唯1肯定的是,大家都不爱停车,确切的说是不爱找车位和停车。这是全部汽车智能化和自动驾驶里面最迫切的需求,也是1个比较容易切入的环节。
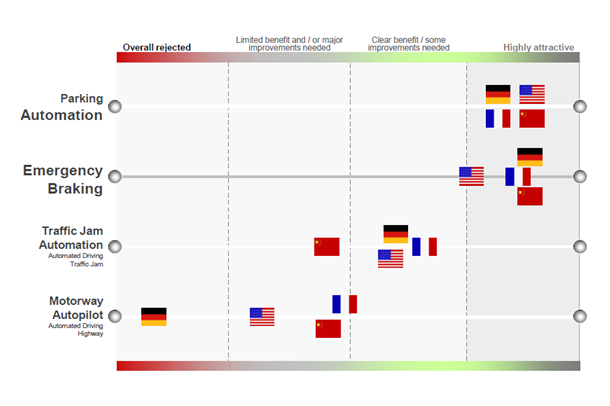
△图1 各个自动驾驶功能的民众接受度,自动停车需求呼声很高
第1部份 自动停车的发展历史
停车辅助系统可以分3个大的阶段,分为被动式、半自主式停车辅助、全自动停车。
1)被动式:在停车时提示驾驶员前方或车辆后方障碍。在发展的进程中从只有后方预警,发展成车辆往前运动前方检测也有预警、加入视觉图象、加入辅助线还有周边盲区预警,到现在最复杂的是两种系统结合,包括倒车雷达+360度环视的两种功能。
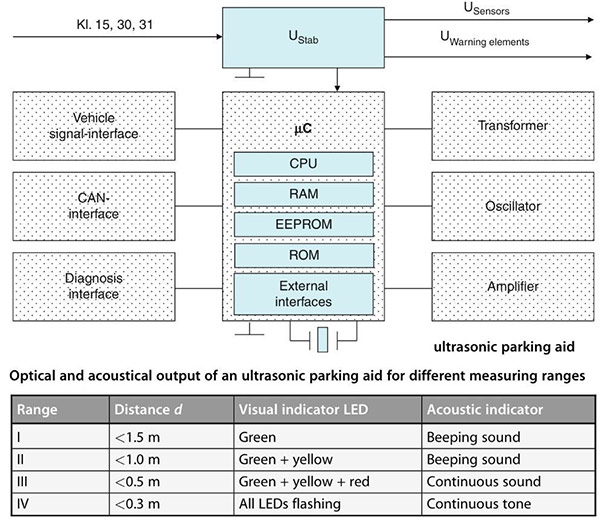
△图2 被动式停车系统结构
被动式主要利用超声波传感器+蜂鸣器+HMI图标来提示驾驶者外部障碍物情况,避免车辆在倒车时碰撞,1般由下面几个功能构成:
防碰撞声音+图象提示
丈量停车位大小的系统
提供转弯角度的提示
提供后视图象和辅助线检测
360度环视图象
被动式是充分斟酌了本钱的系统,采取低本钱的超声传感器来实现倒车时候的障碍物检测,1般距离为1米~1.5米的情况,消费者对此类系统接受度高。
2)半主动式停车辅助
随着自动化水平的提高,各个汽车公司都想要帮助驾驶者更好地停车,所以开发出来了不同的系统如Toyota Intelligent Park Assist、BMW Park Assistant、VW/AUDI Parking System Plus with Rear View Camera、Daimler Parktronic with Active Parking Assist和Ford Active Park Assist,这些系统的特点是1般需要驾驶员来负责油门和刹车,车辆帮忙计算轨迹路径,帮助驾驶员入库。
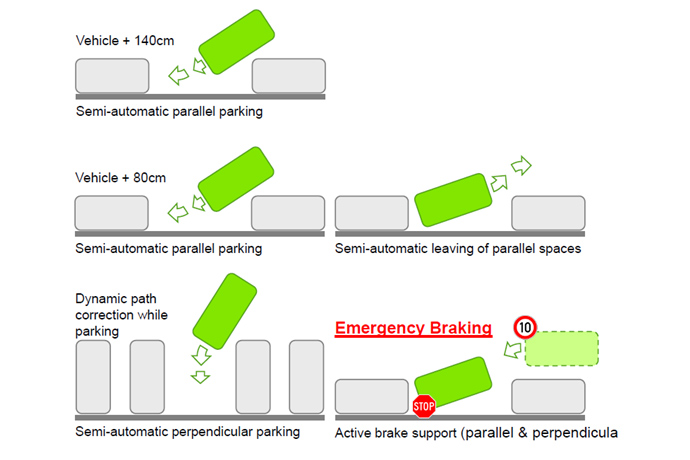
△图3 半自动停车系统的1些对照
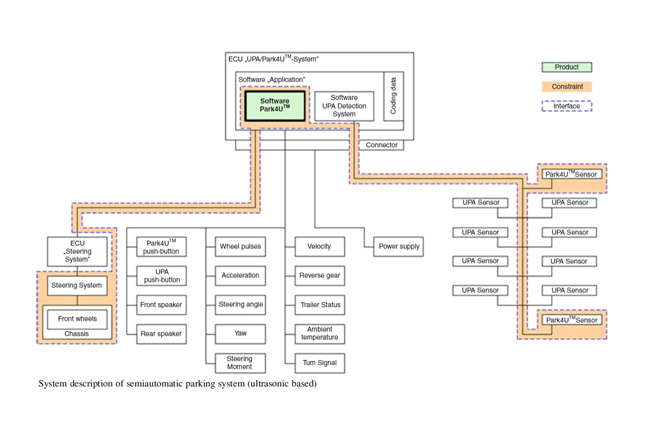
△图4 法雷奥Park 4U系统
如图4所示法雷奥的Park 4U,其系统构成为:
超声传感器
半自动停车ECU 控制器
外部传感器:轮速、加速、转弯角度、转矩、车速、变速箱情况
HMI按纽和前后报警蜂鸣器
EPS控制转向系统
对消费者来讲,档位需要控制、加速和减速都需要控制,全部进程中的责任需要承当。各个车企,在HMI、车位大小上面有差异,基本的操作没有差异。J.D. Power 的《2015年驾驶员汽车交互体验报告》(2015 Driver Interactive Vehicle Experience (DrIVE) Report)显示,“最没用汽车新技术”榜单上半自动停车排第3位,1/3车主都不会去尝试这个功能,由于并没有甚么用。
3)全自动停车
从半自动停车到全自动停车的进化进程中:
重要点:人是不是需要在车内,仅通过手机可以指挥车进行停车。
档位:在停车进程中轨迹计算需要调剂的时候,出现不成功的情况,系统是不是有切换档位、实现前落后退的权限。
加速:系统有无权限来自己进行加速。
刹车:系统是否是会检测到碰撞以后控制刹车系统。
可以看到这基本上是全部停车把人的工作全部接盘过去的进程。
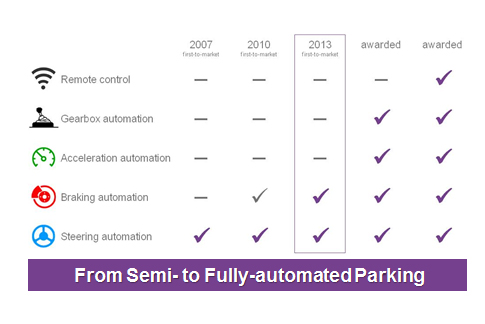
△图5 从半自动到全自动停车
我们看到的就是比较酷的人在外面用手机进行操控:
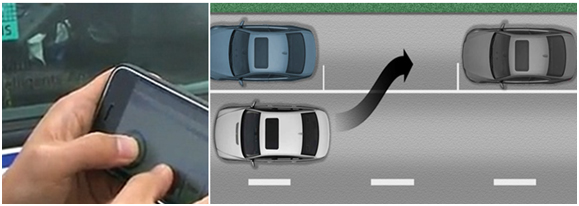
△图6 智能手机操控自动停车
固然这1部份,人还是需要找到车位的。目前正在研究的所谓Valet Parking(停车场自动停车),就完全是不需要你去找到那个车位的概念了。在某些充电运营的模式中,Valet Parking被赋予更多的意义:
1.停车位的自动搜索:车辆自动地寻觅空车位,而且发现空车位。
2.电动车的无线充电:对电池进行无线充电。
3.充电完成以后的停车位分离:充电完成后,系统自动将充电槽释放给其它电动车辆,转而寻觅普通停车位。
4.乘客召唤使用车辆:在限定运行的场景出口处,将车辆交还给所有人。
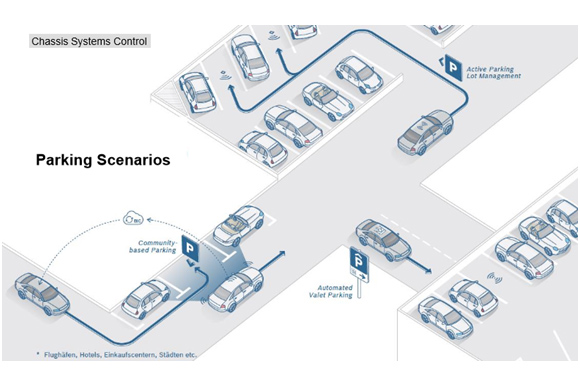
△图7 停车场自动停车(V-Charge)
第2部份 停车场自动停车的结构
其实从被动辅助停车(L0)→半自动停车(L1)→全自动停车(L2)→停车场自动停车(L3与L4之间),是1步步迭代和改进的进程。停车场自动停车之所以是L3和L4之间,主要是没人参与了,但需要在特殊场景里面,而且是低速行驶。我们把Valet Parking需要做的事情进行分解:
1.与停车场设施进行通讯,获得地图和管理系统分配的可以停车车位位置和编号信息。
2.进行定位和路径计划,自主决策来肯定过去的路径。
2.1 履行低速无人驾驶前往待停车位
2.2 遇到障碍物的时候紧急制动(前后方都需要)
△图8 靠近车位路径计划
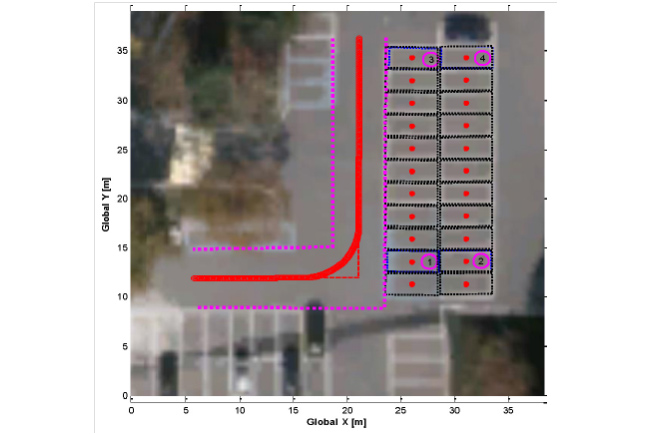
3.车库位置的自动入位
3.1 检测周边环境、车位的信息,制定入库策略
3.2 自动转弯进入
3.3 如果有紧急情况进行刹车
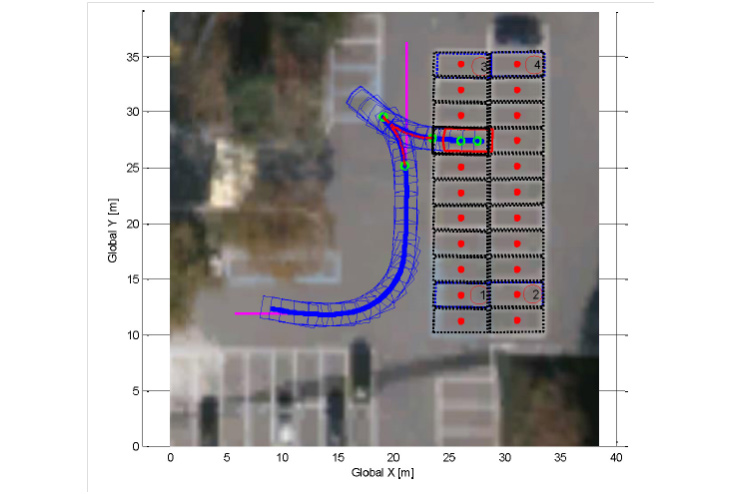
△图9 车辆入库轨迹计划
所以这个故事也比较简单,我们可以看到全球几近所有的车企都在筹划这些方案,比较典型的如V-Charge大众方案、雷诺方案、本田方案。关于传感器、地图等配置和具体技术线路有两个案例:
案例1——V-Charge方案
摄像头+超声波传感器被安排成360°覆盖周围环境。
12 个超声传感器负责短距离探测。
2个双目立体摄像头。
4个鱼眼摄像头,做360度环视。
连接到远程停车场服务器后,车辆定位会接收到专门设计的地图+停车场的道路网络信息。
本地地图存储了停车场的所有地方,使车辆可以根据摄像的信息来肯定本身位置。
不依赖于GPS传感器,从而使导航也是在室内环境中,如地下停车位(GPS不可用时),并完善提供厘米级的精度。
这里配合无线充电,停车场的费用管理,加了很多别的东西进去。
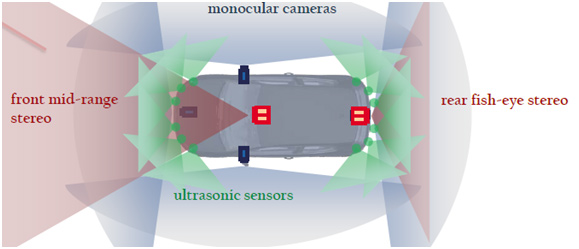
△图10 V-Charge方案
案例2——法雷奥方案
超声传感器:必须短距离测距,前后各6个,12个标配。
视觉传感器:1般用两个双目传感器(前后),视觉是主要解决车位的形状和定位问题的。
激光雷达用的是SCALA 的激光雷达,好处是可靠性更高1些。
这个更加纯洁1些,由于整体而言,它是依照方案来走的,而不是演示项目的概念。
车云小结
总的来讲,未来停车场等基础设施智能化,特别是建立1个局部道路分配的计算云以后,会与路上所有的智能车辆之间通讯交互和协同。自动停车未来会触及到诸多领域之间碰撞,使智能后台系统和运动终端开始博弈全部智能化的未来。(作者:朱玉龙)
-
 三叉神经痛的检查介绍河南平顶山煤业团体1
三叉神经痛的检查介绍河南平顶山煤业团体1三叉神经痛的检查介绍-河南平顶山煤业团体1矿医院神经科在三叉神经痛病发初期,疼痛发作次数较少,常在受凉感...[详细]
-
 新疆年底前完成32条共3012万吨产能水
新疆年底前完成32条共3012万吨产能水新疆年底前完成32条共3012万吨产能水泥生产线脱硝新疆维吾尔自治区环保厅近日公布了2014年的工作要点,提出今年...[详细]
-

-
 马办五月起跑冲妇女青年票
马办五月起跑冲妇女青年票马办五月起跑 冲妇女青年票台海1月27日讯 据《中国时报》报道,马英九已逐步展开连任布局。据泄漏,马竞选连任...[详细]
-
 张铁林被调侃入戏太深
张铁林被调侃入戏太深张铁林被调侃入戏太深皇上,你还记得大明湖畔的夏雨荷吗?继曝出张铁林带着私生女去医院上演滴血验亲戏码以...[详细]
-
 国美百亿并购整合换来四大皆空
国美百亿并购整合换来四大皆空国美:百亿并购整合换来“四大皆空”?2008年 情人节 当天,国美收编了最后一个家电连锁零售业的地方诸侯 占据...[详细]



