Ranger展示可用于自动驾驶的高精度定位系统
美国西南研究院将于2016年5月2日在新奥尔良举行的AUVSI XPONENTIAL讨论和交易大会上,展现了Ranger高精度定位系统解决方案。Ranger是得到专利认证的车辆定位技术,通过商业化的硬件装置和西南研究院特别设计的算法,可以为自动驾驶汽车提供精确度极高的导航信息。最新的Ranger套装利用到自动驾驶系统、代客停车服务、货运分配、客车或重载卡车对接等领域。
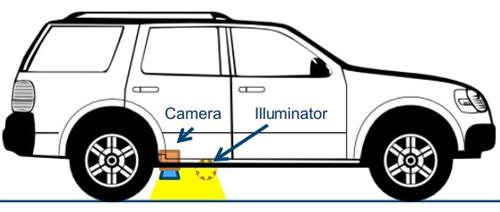
Ranger高精度定位系统尺寸更小、运算更快、工作更稳定,实际利用起来本钱也相对较低。Ranger是集合软件和硬件的产品解决方案,利用俯拍摄像头和定位算法来提供准确的位置和方向丈量数据。该系统能够收集道路表面的特殊纹理特点,并与地表特点数据库进行比较,例如集料特性、裂纹形状、道路标示等,从而同已贮存的地图进行位置匹配。

△搭载Ranger系统车辆的底板结构
△侧视结构图
道路表面的可见斑块散布是非常容易辨认出来的,Ranger成功利用了这1点来实现系统功能。对绝大多数的道路(例如沥青和混凝土结构),它们的显著可见特点常常包括污渍点、裂缝、柏油补钉、外露集料等,另外那些不太明显的形态和纹理也可用于道路特点参考因素。道路各种斑块散布的唯1性能够作为Ranger系统定位的基础,当前所处的道路特点与之前搜集的数据进行比较评估,就能够取得准确的位置信息。为了构建1个完全的定位系统,路面影象地图是必不可少的。把路面特点信息添加到地图资料中,也是未来大势所趋。
Ranger地图概念性地加入全球认可的固定参考系下影象信息,只要这些搜集影象是实时准确的,系统定位丈量肯定能够保证高精度。为了确保局域和全球地图的1致性,全局光束平差优化法被开发用来修正原始地图数据。优化均衡因子有初始的摄像位置丈量信息(地图数据收集阶段通过全球卫星导航系统获得),移除动态数据收集车收录连续影象的堆叠部份,更加清晰地展现相对位置关系。
1旦地图数据库构建完成,实时影象数据将开始与贮存信息进行对照,完成定位操作。匹配进程基于传统的影象对照技术,这类技术经过了大量的修订和优化,具有非常高的实际利用价值。基本的技术原理以下:
1.利用Detect Keypoints、Extract Feature Descriptors数据提取软件,检测图象特点信息。
2.实时影象与数据库候选资料进行对照。
3.利用几何束缚刚性变换技术,通过随机抽样1致性算法匹配重要特点。特殊的刚性变换是不可缺少的1个重要部份,旋转和平移操作提高实时影象和贮存信息之间的匹配准确度。
4.如果足够多的对照点满足刚性变换束缚,则可以证实实时影象和贮存信息是统1的。
对自动驾驶汽车而言,Ranger系统是1种新颖的定位技术,在各种光照强度和卑劣天气条件下(暴雨、雾霾等),都具有出色的工作性能表现。基于传感器的定位系统更加常见,不过Ranger系统利用控制照明的摄像头,是唯一无2的解决方案,并且有着极为高的定位准确性。自动驾驶汽车的定位误差在2厘米范围内,与价格高昂的最高精度卫星导航系统相当。卫星导航系统在有些地区或环境条件下(隧道或地下通道),性能极差乃至没法正常工作,但是Ranger系统表现始终如1,不会遭到其他因素的干扰。
卫星导航系统已得到普及,每一个人的智能手机都安装了该系统,不过其定位准确度还很难利用到自动驾驶汽车中。
-
 三叉神经痛的检查介绍河南平顶山煤业团体1
三叉神经痛的检查介绍河南平顶山煤业团体1三叉神经痛的检查介绍-河南平顶山煤业团体1矿医院神经科在三叉神经痛病发初期,疼痛发作次数较少,常在受凉感...[详细]
-
 新疆年底前完成32条共3012万吨产能水
新疆年底前完成32条共3012万吨产能水新疆年底前完成32条共3012万吨产能水泥生产线脱硝新疆维吾尔自治区环保厅近日公布了2014年的工作要点,提出今年...[详细]
-

-
 马办五月起跑冲妇女青年票
马办五月起跑冲妇女青年票马办五月起跑 冲妇女青年票台海1月27日讯 据《中国时报》报道,马英九已逐步展开连任布局。据泄漏,马竞选连任...[详细]
-
 张铁林被调侃入戏太深
张铁林被调侃入戏太深张铁林被调侃入戏太深皇上,你还记得大明湖畔的夏雨荷吗?继曝出张铁林带着私生女去医院上演滴血验亲戏码以...[详细]
-
 国美百亿并购整合换来四大皆空
国美百亿并购整合换来四大皆空国美:百亿并购整合换来“四大皆空”?2008年 情人节 当天,国美收编了最后一个家电连锁零售业的地方诸侯 占据...[详细]



